都市環境における線分特徴の方向性分布を利用したSLAM
あらまし
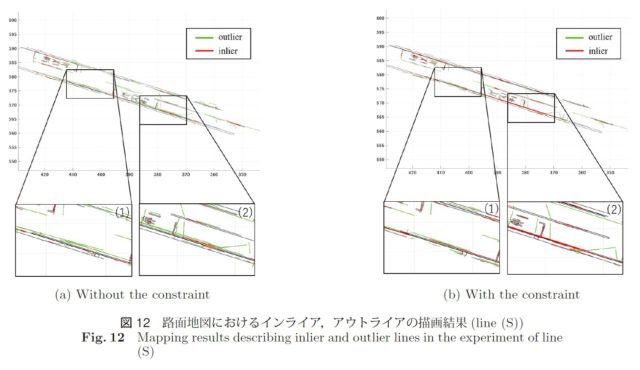
本論文では,線分特徴の事前分布を考慮した自動運転車のためのSLAM (Simultaneous Localization and Mapping) を提案する.提案手法は,道路標示や建物など,線分を検出しやすい物体が存在する都市環境を走行する車両に搭載されたカメラにより撮影される動画像を入力とすることを前提とし,この動画像から検出される線分特徴の方向に関する制約を加えることによりSLAM の精度を向上させるものである.線分特徴の方向に関する制約を加えるため,本手法では道路標示中の線分が車両進行方向に対して平行,もしくは垂直であるものが多いことに着目し,それら2 つの線分間の角度分布が混合ガウス分布に則ると仮定し,バンドル調整による最適化に導入する.これにより,カメラの位置姿勢と線分特徴の位置推定の精度を高めることが期待できる.本手法の有効性を確かめるため,カメラを1 つ用いたシングルカメラシステムと,2 つ用いたマルチカメラシステムの両方に提案手法を適用し精度検証を行った.その結果マルチカメラによる従来手法の精度と,シングルカメラによる本手法の精度が同等となった.また提案手法により生成した路面地図は,線分の方向に関する制約を導入したことにより補正され,精度向上を確認した.
著者
上原啓† 斎藤英雄† 原孝介††
† 慶應義塾大学, †† デンソーアイティラボラトリ



