画像電子学会 研究会講演要旨
第190回 研究会(2001年 11月 22日)
スペクトルモーメントを用いたテクスチャ平面の回転と傾き角の検出 |
辻敏雄(京都工芸繊維大学) |
本研究は,スペクトルモーメントを用いてテクスチャ平面の回転角,傾き角と
傾く方向を検出することを目的としている.
テクスチャ平面の模様がエッジのある構造的なテクスチャの場合,
回転,傾き前の標準画像と回転,傾き後のテスト画像の対応点を見つけて,
角度検出を行う方法が考えられるが,対応点の検出は面倒な作業である.
特にエッジのない統計的なテクスチャの場合は,対応点の検出はかなり難しい.
本研究では,パワースペクトルの変化を利用して角度検出を行う.
テクスチャ平面が回転すれば,画像もパワースペクトルも同じだけ回転する.
また,平面が傾けば画像はその方向に縮小し,反対にパワースペクトルはその方向に拡大する.
このようなパワースペクトルの特性を利用すれば,テクスチャ平面の回転角,傾き角,
傾く方向を検出することができる.
本研究では適当なパラメータとしてパワースペクトルの2次のモーメントを選び,
角度検出を行う.
具体的には,回転も傾きもない正面から捉えた標準画像と回転と傾きのある
テスト画像のパワースペクトルとスペクトルモーメントを求める.
次に,2つの画像のモーメントを検出式に代入することにより,
テスト画像で捉えたテクスチャ平面の回転角,傾き角,傾く方向を検出する.
実際に,コルクとレンガのテクスチャ平面画像によるシミュレーション実験
とCCDカメラで捉えた実画像による実験を行い,シミュレーション実験では,
回転角と傾き角が1度以内,傾き方向が5度以内の誤差,
実画像による実験では,回転角が1度以内,傾き角が
5度以内,傾き方向については一部例外を除くと10度以内の誤差であった.
|
テロップ文字認識に基づく商品紹介ビデオの区間分割 |
藤本雅清(龍谷大学) |
本研究では、企業で作成された商品の紹介,宣伝用のビデオを各商品の区間に分割し,索引付けを行うシステ
ムについて検討を行った。
商品紹介映像の分割を行うにあたっては,映像中に含まれる音声情報が有力であるが,商品紹介映像には,常
時,音楽などの雑音が音声に重畳しており,音声認識等によりキーワードを抽出することが困難であるという
問題がある.また,商品紹介映像には,音声情報以外に,画像情報にも映像の分割に有用な情報が多く含まれ
ている.以上のことから本研究では,映像中に含まれる画像情報を用いて,商品紹介映像の区間分割及び索引
付けを行うことを試みた.
映像中に含まれる画像情報として,本研究では,商品紹介映像に出現するテロップ文字及びフリップ文字を利
用しており,これらを商品紹介映像から抽出,認識することによりキーワード(商品名)を抽出し,映像区間分
割及び,索引付けを行っている.テロップ文字を認識する際には,映像中からテロップ文字出現フレームを正
確に検出する必要があるが,従来法では検出精度が低く,重要なキーワードが出現したフレームが検出できな
いという問題がある.この問題を解決するために,映像中の音声情報(音響パワー)を用いることにより,テ
ロップ文字出現フレームを正確に検出し,検出されたフレーム画像に対して文字認識を行うことにより商品紹
介映像の区間分割及び,索引付けを行った.
|
領域分割に基づく画素置換型データ埋め込み法に関する考察 |
新見道治(九州工業大学) |
「何気ない情報」の中に「意味のある情報」を隠す技術であるステガノグラフィは,近年注目されつ
つある.ステガノグラフィ技術にはいくつかの方法が存在するが,我々の研究室で開発した大容量埋
め込み可能なBPCS-Steganographyは画素置換型データ埋め込み法に分類できる.画素置換型データ埋
め込み方法以外にも,画像を他空間に変換しその空間上でデータを埋め込む変換型データ埋め込み法
も存在するが,本稿では画素置換型データ埋め込み方に焦点を当てる.
BPCSでは,画素置換を行うために領域分割により埋め込み可能領域を決定する.画素置換型データ埋
め込み法では基本的に,画像内のノイズ状の領域をノイズ状に加工したデータで置換する.これは,
人間の視覚はノイズ状の領域を他のノイズ状のデータで置き換えても影響を受けないという特性を利
用している.ノイズ状のパターンか否かを判定するには何らかの尺度が必要なる.BPCSでは,多値画
像をビットプレーンして得られる2値画像の局所領域に対して複雑さと呼ばれる尺度でノイズ状のパ
ターンであるか否かを判定している.
本稿では,データを画像に埋め込む場合の領域分割の尺度として,ビットプレーンベースの方法
(BPCS),画素値の差分ベースの方法 (PDCS),周波数情報を利用する方法 (FBCS)について比較検討す
る.周波数情報を利用する方法では,離散コサイン変換して得られるAC係数に着目し,その情報を利
用してノイズ状のパターンが埋め込むことができる下位ビットプレーンを特定する.
閾値を変化させながら,埋め込み量と画質の変化を実験的に検証した.その結果,埋め込み量が同じ
場合,FBCSが高PSNRを実現できており,周波数情報を利用した埋め込み処理が有効であることを確認
した.
|
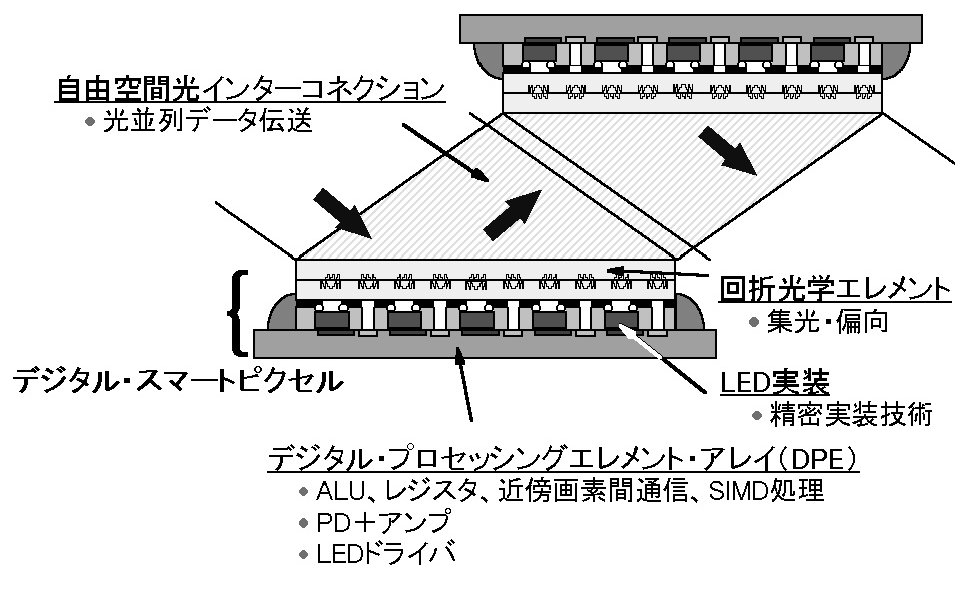
高速視覚センサ「デジタル・スマートピクセル」と高速機器制御 |
武内喜則(松下電器産業株式会社) |
現在の一般的な画像処理システムにおいて、実世界からの大容量データは、まずCCDでセンシングされた後、パラレル-シリアル変換されて、フレームメモリに送られる。このパラレル-シリアル変換は、高速画像処理を実現する上でのボトルネックである。このため、2~3倍速のCCDが出現してはいるものの、従来型画像処理技術では、ビデオレートの33ms/frame程度に処理速度が制限されるため、対象物の動きに合わせて機器を制御するビジュアル・フィードバックを、容易に実行することが困難である。われわれは、このボトルネックを解消するシステムとして、1ms/frame以下のフレームレートで動作する高速視覚センサのデジタル・スマートピクセルと、これを使った自由空間光インターコネクションによる光並列処理システムを開発した。デジタル・スマートピクセルは、光入出力機能と演算処理機能がハイブリッド集積されたデバイスである(図)。土台となる部分は、Si-LSIのDPEアレイ(Digital Processing Element Array)で、画素ごとにALU、レジスタ、PD、LED駆動回路、近傍画素との通信機能を有し、外部から入力されたプログラムに従ってSIMD型の並列処理を実行する。DPEの各画素には、LEDをフリップチップ実装し、処理結果を各画素から一斉に光出力する機能を実現している。素子上部には、回折光学素子アレイを形成した石英基板を実装し、処理結果の並列伝送の時の光結合効率向上を図っている。この並列データ伝送機能を使えば、デジタル・スマートピクセルを多段接続することができ、その処理能力を拡張できる。自由空間光インターコネクションを用いて、デジタル・スマートピクセルをカスケード接続したシステムは、パラレル-シリアル変換ボトルネックの無い実時間処理システムである。われわれは、今回8×8画素と16×16画素の素子を試作し、このうち8×8画素の素子を使って、高速機器制御のデモンストレーションシステムを構築した。このシステムは、デジタル・スマートピクセル2個をカスケード接続した光並列画像処理システムを中核としており、フィードバック信号送出間隔は1.5msである。これは、光並列処理を用いた高速機器制御システムとしては、世界初の実動システムである。
図の説明:デジタル・スマートピクセルの構造とカスケード接続 |
Eurographics 2001 報告 |
北村喜文(大阪大学) |
Eurographicsは,ヨーロッパで歴史と権威のあるコンピュータグラフィックスに
関する国際会議として,毎年,8月か9月に,ヨーロッパ諸国の魅力的な街を順に
廻る形で開催されている.今年は第22回目にあたり,9月4日~7日に,英国のマ
ンチェスターのUMIST (University of Manchester Institute of Science and
Technology)で開催された.
プログラムは,3件(本会議中毎日1件)のKeynote Speech,54件(18セッション)
のTechnical Papers,48件(8セッション)のShort Presentations,5件のSTARs
(State-of-the-art Reports) ,9件のTutorials,3件のWorkshopsなどから構成
され,Plenary以外は常時4セッションが並列で進められた.参加者数は約300名
であった.
Technical Paper では,今年は過去最高の174件の論文投稿数があったそうで,
その中から54件の論文が採択・発表された.今年のEurographicsの最大の話題と
しては,何と言っても,日本から8件ものTechnical Paperが採択されたことであ
ろう.本報告では,これら8件の発表者の中から,本報告の主旨に賛同した5グルー
プ7名が,Eurographics 2001で見聞きしてきた内容を分担して報告する.必ずし
も会議全体をカバーしきれてはいないが,有益な興味深い情報を記載するように
心がけたつもりである.また,我々日本勢がEurographics 2001で発表してきた
内容も各著者が自らの発表論文の要約を日本語で執筆し,簡単に紹介する.
Eurographicsは,いろいろな点で魅力の多い会議である.まず,講演会場は大学
の普通の講義室や大講義室程度の部屋であるため,講演者の話をしっかり聞ける.
また,会議の予稿集がComputer Graphics Forum というVolume とNumber 付きの
ジャーナルとして発行されるため,会議自体への参加者はそれほど多くなくとも
発行部数が多くなる.そして,Eurographics最大の魅力としては,やはり何と言っ
ても,ヨーロッパの魅力溢れる街で順に開催されるので,旅の楽しみも合わせて
満喫できるという点であろう.
|
CG画像を介在させた物体認識処理方式 |
森克己(福山大学) |
我々は多くの時間を既知の空間内で既知の物体に囲まれて過ごしているので、生活支援型のロボットの認識対象 空間および物体も既知と考えることができる。ここでは、既知の空間内で既知の物体を、物体、ロボットの位置、視点が時間とともに変動すると いう条件下で認識することを考える。空間、物体が既知であれば、予めそれらに関する知識を3次元CGデータとして保有することができる。そ こで、ロボットの位置、視点に応じてロボットの目に写る予測シーン画像をCG画像として作成し、予測シーン画像と実シーン画像を対照するこ とで物体認識を行う。図1は予測シーンCG画像、図2は実シーン画像である。これらの画像を使って、カメラ校正用の標定点の検出実験と机上 の小物体のサイズ計測実験を行った。その結果、予測シーンCG画像の利用は、標定点検出処理量の軽減と信頼性の向上に極めて有効であり、サ イズ計測精度も充分実用的であることが分かった。
図1.予測シーンCG画像 図2.実シーン画像 |
時系列ボリュームデータの領域追跡を用いた関節物体の体節への分割手法 |
飯山 将晃(京都大学) |
人体に代表される関節物体の動作モデルを
複数方向から撮影された映像を用いて
獲得する手法を提案した.
ここでいう動作モデルとは,
それぞれの体節の形状とその運動を表現するモデルを指す.
近年,レンジセンサやカメラを用いた形状計測方法が提案され,
物体の形状をボリュームデータとして時系列で獲得することが可能となった.
しかしながら,このとき得られる情報は関節物体全体の形状であり,
物体の形状を計測したからといって,その物体がどのように運動するのかを知ったことにはならない.
そのため,物体の動作モデルを獲得するためには計測された形状から
それぞれの体節(例えば手や足)などがどのような形状をし,
またそれらがどのような運動をしているかについて知る必要がある.
そこで,本研究ではボリュームデータを体節毎に分割する方法を提案した.
関節物体の構造についてのモデルとして,
各体節が剛体であること,そして体節の形状が空間的に連続した領域で表されること
の2つを与え,このモデルに基づいて分割を行った.
各体節の形状は,
各映像に予め与えておいた対応点とボリュームデータの局所的な形状特徴を用いて
ボリュームデータの運動を追跡し,
その結果を基にボリュームデータを体節毎に切り分けることで得られる.
具体的な処理の手順として,
まず同一の体節に属すると考えられる対応点をクラスタリングし点クラスタを得る.
次に点クラスタの剛体運動を対応点の位置変化と対応点の周辺に存在するボリュームを
用いて推定する.
最後に点クラスタの剛体運動をもとにボリュームデータを剛体とみなせる領域にクラスタリングし,
得られたクラスタを各体節の形状とした.
提案した手法を右腕のシミュレーションデータに適用することにより,
ボリュームデータを上腕部分と下腕部分に分割できることを確認した.
|
視点位置推定による動画像からの屋外環境の三次元モデル化 |
佐藤智和(奈良先端科学技術大学院大学) |
屋外環境の三次元モデルは, 景観シミュレーション, ナビゲーション, 複合現実
感などの幅広い分野で利用されている. しかし現在, このような分野で用いられ
る三次元モデルは,
三次元モデラなどを用いて手動で作成されており, これには多大な労力が必要で
ある. このため, コンピュータビジョンの分野において, 複数の画像を用いてモ
デルの作成を自動化する研究が盛んに行われている. 発表では, まず, 従来我々
が提案したマーカと自然特徴点の追跡に基づくカメラパラメータの復元手法を用
い, 数百枚から成る動画像からカメラの外部パラメータを効率的かつ安定に推定
する手法について述べた. 続いて, 推定したカメラパラメータを用いたマルチ
ベースラインステレオ法により, 数百フレームのシーンの奥行きを密に推定し,
それらをボクセル空間を利用して統合することで屋外環境を密に三次元復元する
手法を提案した. また, 建物と町並みの二つの屋外環境の復元結果を示すこと
で, 本手法の有効性を示した. 本手法では, 奥行きの連続性に関する制約条件を
用いず, 多くの情報を統合することにより, 複雑な屋外環境を正確に復元するこ
とが可能である.
|
鏡平面への映り込みを考慮したPhotometric Image-Based Rendering |
石井育規(岡山大学) |
コンピュータグラフィクス(CG)において,自然な陰影の生成は重要な技術課題
である.近年,仮想物体を対象とするだけでなく,実世界の物体も対象として,
この技術の重大性が増大しつつある.実世界を対象としたCGは,商品広告,映
画など様々な分野への応用が期待されており,実画像と見分けのつかない写実
的な画像生成が要求される.
我々は,物体形状や反射特性などのパラメータを陽に復元することなく任意光
源方向の画像を生成するための手法としてPhotometric Image-Based
Rendering (PIBR)を提案している.PIBRは,光源方向を変化させて撮影した複
数枚の入力画像を直接利用することにより,自然な陰影のある画像を生成でき
る.しかし,従来までのPIBRは,1次反射のみを対象としたものであり,相互
反射の存在するシーンを取り扱うことはできなかった.
そこで,本研究では,PIBRの枠組で,相互反射の一種である鏡平面への映り込
みが存在するシーンの画像生成法を提案する.鏡平面を含むシーンは,実光源
とそれが鏡平面に面対称な位置に映り込んだ対称光源の2光源が存在するシー
ンとみなすことができる.そこで,物体表面の各点における光源からの照らさ
れ方を分類し,考えられる全ての組合せについて検証することで,従来の画像
生成法が2光源のシーンにも応用可能であることを示す.実画像を用いた実験
により,鏡平面への映り込みが存在するシーンにおいても,自然な画像が生成
できることを確認した.
|